Compte-rendu APBTeam 2013
Si vous voulez voir la méca APBTeam de plus près, voici une vidéo qui vous montre tout en détails :
https://www.youtube.com/watch?v=60Q6FidEqdU
Aussi une petite vidéo sur un tir particulièrement artistique lors du dernier match de qualification :
La coupe vient de se terminer. Nous sommes arrivé jusqu'en huitième de finale et nous finissons à la 9ième place sur 167 robots inscrits et 146 robots homologués.
Comme notre robot n'empile pas les verres, action la plus rentable du règlement, nous ne nous attendions pas à de si bons résultats. Sur les autres actions, ouverture des cadeaux, soufflage des bougies et tir des cerises en haut du gâteau, le robot s'en est très bien sorti.
Merci beaucoup à nos sponsors sans qui nous n'aurions pas pu arriver à un robot aussi réussi !
https://www.youtube.com/watch?v=NdlRUy3LCJI
Les autres vidéos des matchs sont disponibles sur notre playlist 2013 youtube.
Nous venons de finir notre 5ième match avec un score de 95 points. Nous étions 9ième avant ce match, les 8ièmes de finale sont possible !
Au niveau des actions, le robot est plutôt fiable, on a même eu le luxe d'une nuit complète de sommeil avant le 5ième match. Vous trouverez les vidéos à notre retour, en attendant, n'oubliez pas la webtv : http://webtv.planete-sciences.org/
En direct de la coupe de France de Robotique, APBTeam s'est homologué !
Le nouveau système d'évitement utilisant nos balises a très bien fonctionné malgré toutes les tentatives pour nous faire percuter un robot crash-test.
Des vidéos arriveront dès que nous pourront les envoyer, l'accès à internet étant plutôt limité.
Vous pouvez également nous suivre sur twitter: @apbteam
Hello !
Ce week-end nous avons pu tester le tir balistique embarqué dans le robot. Pour un premier jet sans trop de réglages, la cadence est d'environ deux balles par secondes avec un taux de réussite variant entre 70% et 80%.
Quelques illustrations :
https://www.youtube.com/watch?v=GQN9kHVVmOg
La méca avance, mais l'électronique aussi !
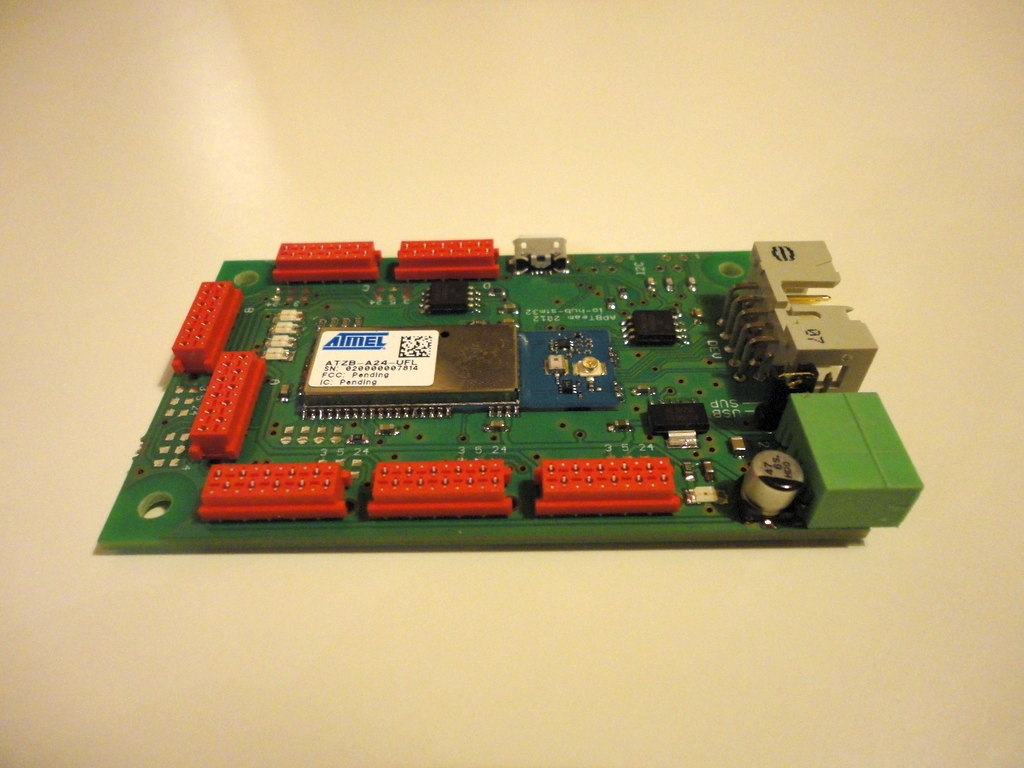
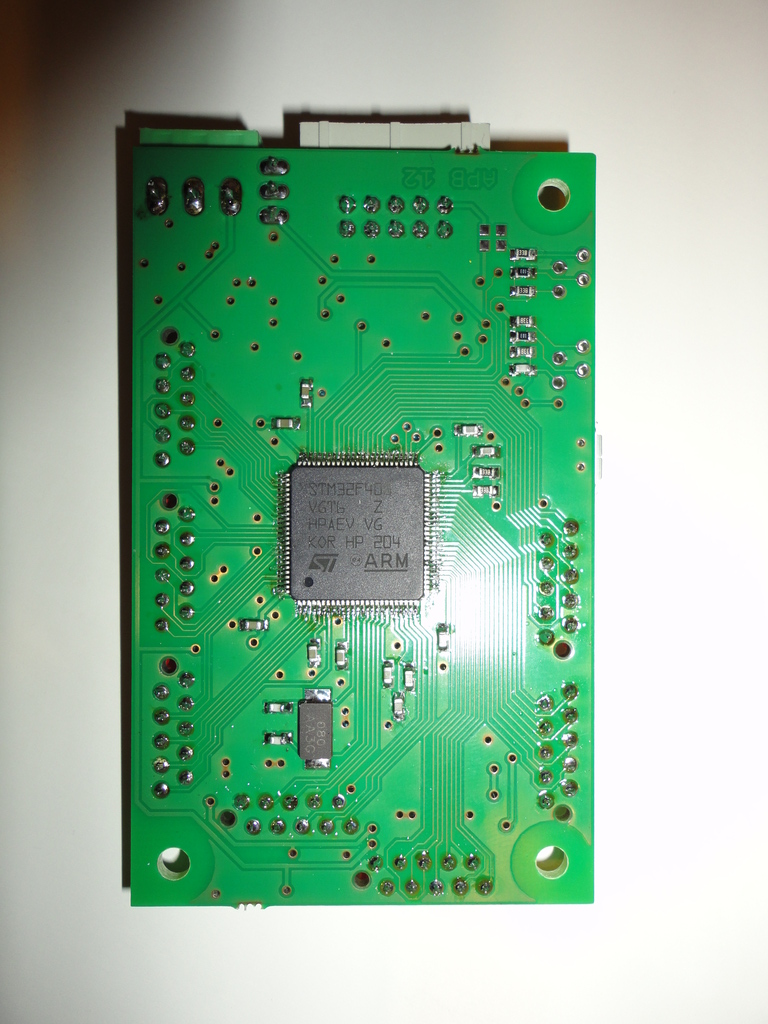
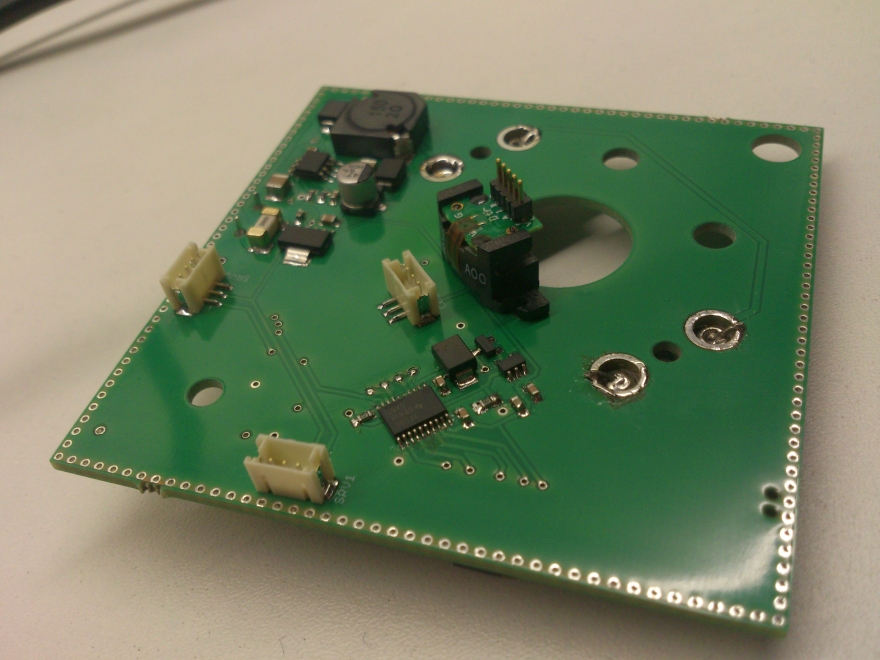
Depuis deux semaines nous nous activons à câbler et tester les nouvelles cartes de cette année !
Au menu, la nouvelle carte io-hub-stm32 composée d'un STM32 (arm) de chez STMicroelectronics ainsi que d'un zigbit de chez Atmel :
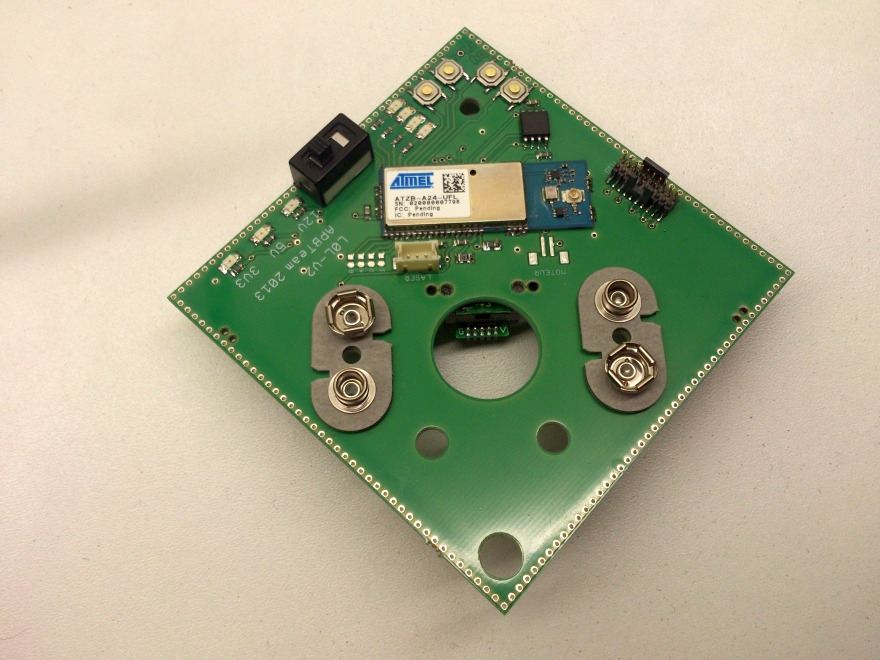
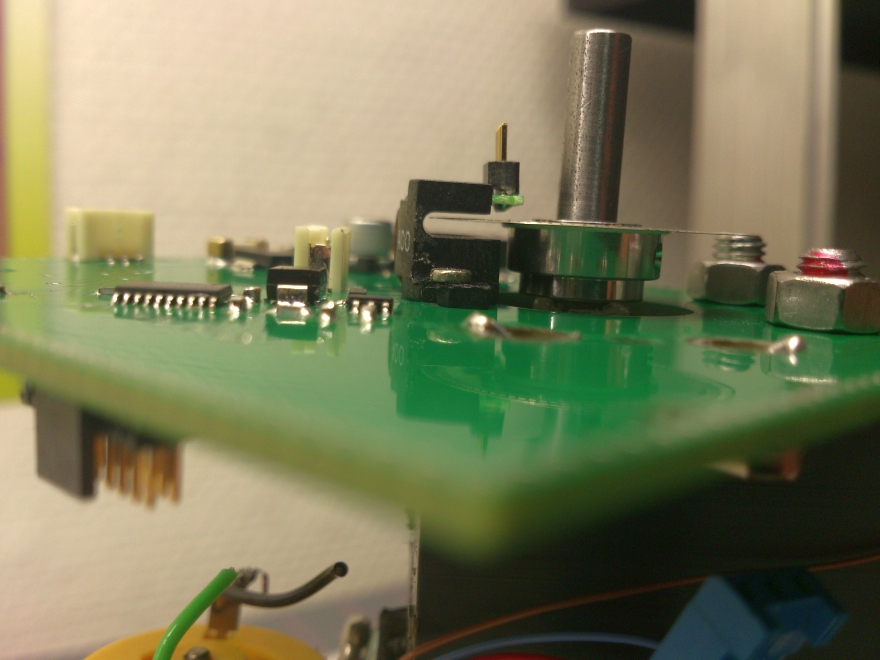
La nouvelle version de la carte des balises externe est aussi finalisée et validée !

Hello,
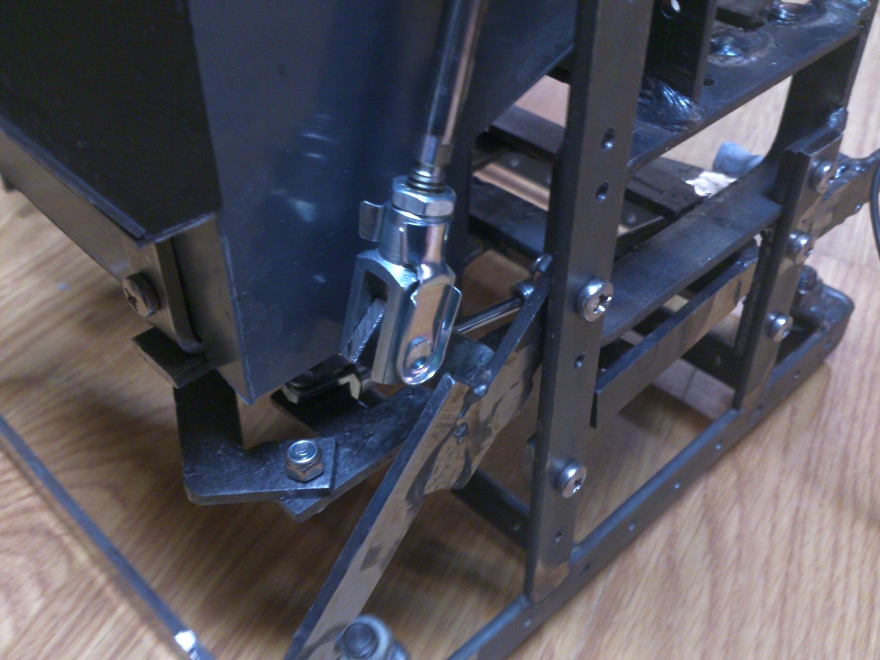
Quelques photos en vrac de l'avancement méca:
1/ Fixation de la benne pour les balles de ping pong
2/ Fixation de la pince latérale (bougies)
3/ Fixation de la pince dorsale (assiettes)



Hello,
Voici deux petites vidéos issues de l'avancement de ce week-end
Ci-dessous une vue rotative du cadre en acier du robot. Il servira de support pour la plupart des éléments.
https://www.youtube.com/watch?v=sPx6n5DC-9w
En voici le bras dépliant qui servira à enfoncer les balles de tennis:
Bonjour à tous,
A l'APBTeam, ce que nous aimons surtout faire chaque année, c'est des mignons petits robots en acier avec de jolis bruits de cliquetis qui généralement ne laissent pas indifférent notre public.
Evidemment, ce matériau ne se travaille pas comme de l'alu, du bois ou du carton et nécessite un outillage très adapté.
Comme vous pouvez le voir sur les vidéos suivantes, les principaux accessoires de nos deux mécanos, Fred et Marcel (on cherche toujours un Jamy  sont le poste à souder à l'arc et la meule.
sont le poste à souder à l'arc et la meule.
En voici une petite démo :
Soudure à l'arc :
https://www.youtube.com/watch?v=xhmGZuKQL3A
Lissage de la soudure à la meule :
Bonjour à tous,
Ce week-end nous avons entre autre testé notre solution méca pour l'envoi des cerises sur le gateau.
Premier constat : sans la mousse ça rebondit vraiment partout ! (ca nous a au moins permis de faire la poussière sous les tables lorsqu'on allait chercher les balles)
Deuxieme constat (plus technique) : pour avoir de la précision, il faut absolument un canon ajusté (ie, de diamètre interne très proche du diamètre de la balle de ping-pong soit 40mm) En effet, sans cela la balle "flotte" dans le canon et sa direction en sortie de tuyere n'est pas constante.
Troisième constat : comme le montre la vidéo suivante il y a de sacrées perturbation en sortie de canon. Nous n'avons pas encore réussit a évaluer son impact sur la précision du tir.
Perturbation en sortie de canon :
https://www.youtube.com/watch?v=-yjDAWRDifU
Tir balistique en cloche (mono balle) :
https://www.youtube.com/watch?v=SA0xngbUx4A
Tir balistique en cloche (mutli balles) :
https://www.youtube.com/watch?v=jSnICyBMgCQ
Tir balistique tendu (multi balles) :
Hello,
Comme chaque années, un nouveau robot naît au sein d'APBTeam. Mais que devient celui de l'année précédente ? Nous allons voir que nos mécaniciens sont en réalité des sages femmes avec un certain penchant pour Frankenstein.
Tout comme le gâteau de la reine Élisabeth, nous réutilisons des composants de l'ancien robot pour construire le nouveau. La plupart des composants électroniques et mécaniques (du moins ceux qui ne sont pas trop spécifiques à l'année passée) sont retirés de l'ancien.
Guybrush Threepwood le robot APBTeam 2012 en avait dans les tripes et était remplis de pneumatique, de compresseurs, d'électro-vannes, de pistons, de régulateurs, d'électronique, d'acier, de moteurs électriques, d’interrupteurs, de capteurs, de câbles, de tuyaux, de vis et d'écrous. La modélisation des pièces mécaniques sur ordinateur permet de se rendre compte du volume pris par chaque pièces mais le volume pris par les câbles électriques et tuyaux pneumatiques n'est pas du tout négligeables !
Comme on peut le voir dans un précédente vidéo, Guybrush était bien plein malgré son stockage interne des éléments:
https://www.youtube.com/watch?v=v-8bTHSHwJU
Le week-end dernier, le démontage de Guybrush a eu lieu... L'opération a durée un peu moins de 8 heures dont voici quelques photos:

Guybrush complètement démonté (cliquez sur l'image pour voir en plus grand):

- cartes électroniques
- base roulante
- rails sur roulement à bille
- batteries
- beaucoup de vis, de tuyaux et de câbles
- un des pistons de la pince à CD
- un des pistons de la pince tournante
- squelette de la pince tournante avec son support moteur
- porte arrière
- squelette de Guybrush
- électrovannes
- capteurs ultrasons (noires et blancs)
- capteurs de proximité (bleu et orange)
Un aperçu de 75% vis et écrous utilisées. Note: chaque vis ou écrous peut mettre une petite dizaine de minutes a être assemblée selon la difficulté d'accès.

Une des vis les plus étranges rencontrées : sa tête a été mise au carré pour pouvoir la serrer à la pince et a été taillée en pointe.

À notre bonne surprise, les matériaux et composants mécaniques subissant le plus de travail ont bien tenus la rude épreuve de la coupe! Les pistons sont en bon état, le "charbon" qui a servit de contact-relais dans la pince tournante est encore en pleine forme et les rails sur roulement a bille de la pince frontale sont prêts à être réutilisées.
Guybrush est démonté mais la réalisation du robot 2013 a commencé ! Son nom sera prochainement dévoilé.
Pour le prochain démontage de robot, nous détaillerons plus le démontage en photos et détails croustillants.
Hello ! Après quelques semaines sans nouvelle voici un bref article sur notre situation à deux mois de la Coupe de Belgique !
Mécanique
A l'instar des années précédentes, nous nous concentrons à la fabrication d'un unique robot effectuant le maximum des actions que nous pouvons faire tenir dans le périmètre alloué. Cette année nous nous sommes lancé un sacré défi, de tout faire tenir dans un périmètre encore plus petit !
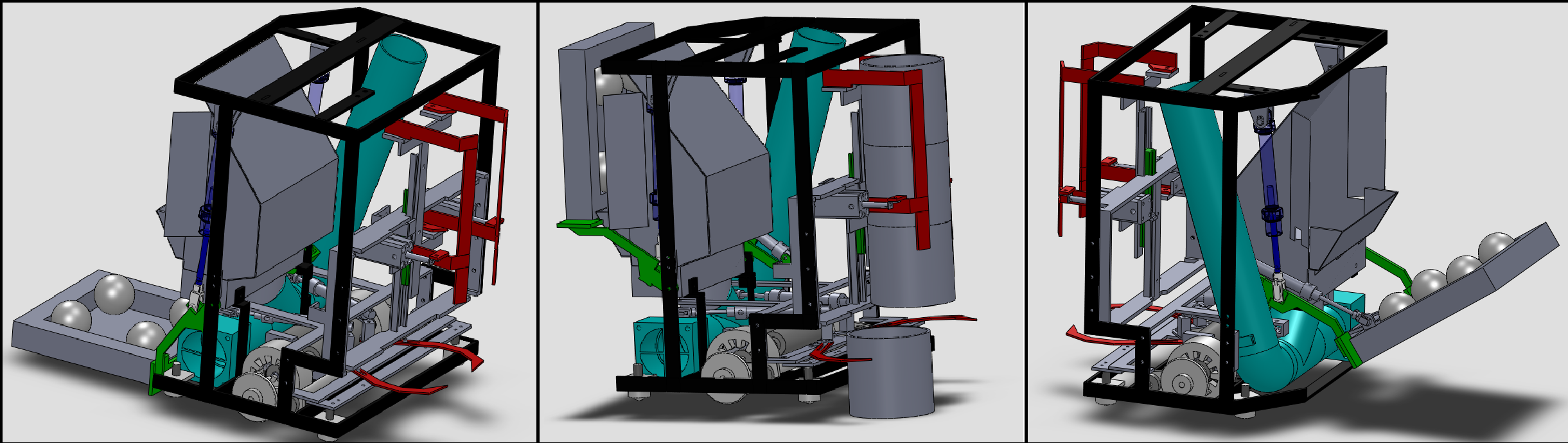
La réalisation n'ayant pas encore commencé, voici un petit teaser avec trois screenshot issue de notre modélisation.
A chaque couleur vous pouvez y retrouver les principaux actionneurs nécessaires pour réaliser différentes actions :
- en rouge la préhension et la construction des tours de verres
- en vert l'avalage des cerises
- en turquoise le canon permettant d'envoyer les cerises sur le gâteau
Electronique
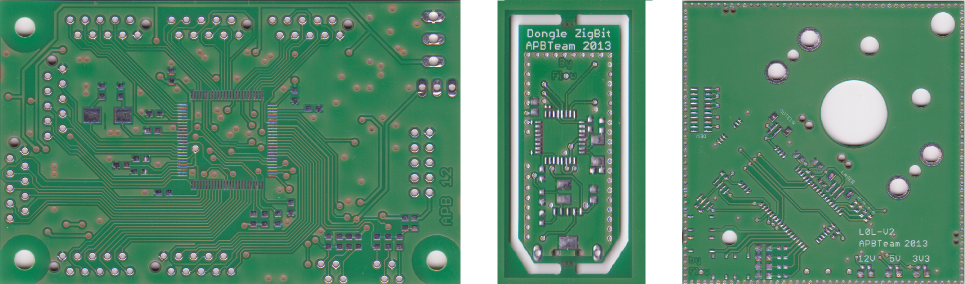
Cette année nous avons développé trois nouvelles cartes :
- io-hub-stm32 (carte contenant l'IA et la connexion zigbee)
- lol-v2 (carte balise externe)
- dongle-zigbit (dongle USB pour communication sans fil en zigbee)
Les schémas étant validés depuis quelques semaines, nous avons recu nos PCB fabriqués par notre partenaire Dipôle-Electronique. Il ne reste plus qu'à les cabler, ce qui devrait être fait le week-end prochain à l'occasion de notre deuxième week-end robotique !
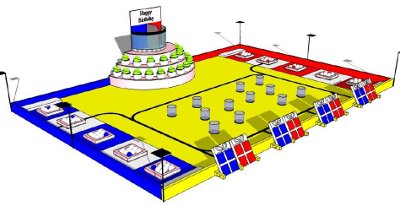
Oui, enfin, la table dans le simulateur :).
La voici, la peinture est encore fraîche :

Vous pouvez la trouver dans nos sources ici:
host/simu/view/table eurobot2013.py et host/simu/model/table eurobot2013.py
Ça y est, c'est vraiment la rentrée, le règlement a été dévoilé cet après midi.
Cette année a l'air d'être un grand cru avec plein d'actions sympathiques à faire réaliser par les robots.
Vous pouvez accéder au règlement sur le site de Planète Sciences.