Compte-rendu APBTeam 2009
En deux minutes ?
Cette année, nous avons eu un robot prêt relativement tôt. Nous sommes arrivés sereins à la coupe et avons homologué le jeudi matin.
Cependant, malgré un robot opérationnel, les matches ne se sont malheureusement pas toujours déroulés comme prévu :
- les différences de conception entre les tables officielles et les tables d'essais ont perturbé notre robot (notre accélération était trop forte) ;
- nous avons été bloqués par le robot adverse lors de la dernière rencontre.
Au final, le score n'a pas été aussi bon qu'espéré : avec 85 points, nous terminons 23ièmes sur 192 équipes, 151 arrivées et 134 homologuées, à 24 points du 16ième. Nous n'atteignons donc pas les 8ièmes de finale.
Néanmoins nous sommes satisfaits de notre robot : non seulement la mécanique est bien plus fiable que l'an dernier (avec l'un des robots les plus lourds de la coupe), mais aussi l'intelligence artificielle peut maintenant se sortir de nombreuses situations et s'adapter aux évènements du jeu. L'électronique n'a pas posé de problème, comme d'habitude maintenant.
Comme chaque année, nous avons participé à l'animation sur le site de la coupe grâce à l'association EFREI Robotique et son camion rempli de Hifi !
Nous avons aussi participé à la coupe d'Île de France et nous somme arrivés jusqu'en quart de finale où nous avons perdu contre EPO (équipe arrivée 5ième de la coupe de France). La coupe d'Île de France réuni les meilleurs ou les plus acharnés d'Île de France.
Tout cela n'aurai pas été possible sans le soutien et le travail des membres de l'équipe, ainsi que sans l'aide de nos sponsors :
Le robot
La coupe de France de robotique
La coupe de France de robotique, est un concours qui oppose des équipes ayant réalisé des robots autonomes suivant un règlement qui change tous les ans. Les robots sont complètement autonomes, c'est à dire qu'ils doivent prendre eux-même les décisions des actions à effectuer.
Nos robots vont se faire bâtisseurs, et devront aider les Atlantes à ériger les somptueux temples dont nous pourrions aujourd'hui admirer les ruines... si nous avions découvert où se cache l'Atlantide. Comme tout temple antique, les constructions se composent de colonnes surmontées de linteaux qui terminent l'édifice. Par ailleurs, et afin que leurs édifices soient le plus proches des dieux, les Atlantes ont coutume de les bâtir sur les collines les plus élevées de leur continent.
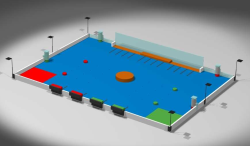
Les matchs impliquent deux équipes, l'une en vert, l'autre en rouge. Chaque équipe ne peut engager qu'un seul robot. Les matchs durent 90 secondes.
Les robots partent d'une zone de départ à leur couleur, située dans l'un des coins arrière de la table. Les éléments de jeu aux couleurs des équipes sont disponibles en plusieurs endroits de la table, soit directement au sol à des positions prédéfinies, soit dans des distributeurs spéciaux. Les constructions doivent être érigées dans des zones de marquage de points spécifiques, colorées de manière distincte du reste de la table. Ces zones de construction ont des hauteurs différentes. Les points sont attribués en fonction de la hauteur des constructions, de leur composition et de la hauteur de la zone où la construction se trouve.
Les règles complètes sont disponibles ici : http://www.planete-sciences.org/robot/data/file/coupe/2009/E2009_rules_and_drawings-FR-fr-final-v1.pdf
Notre stratégie était un jeu en plusieurs temps :
- ramasser les palets disponibles sur la table par un ratissage prédéterminé, puis les déposer en une pile de 4 palets sur le rond central, plus élevé ;
- par la suite, aller chercher les palets situés dans les distributeurs, et revenir les déposer en piles de 4 palets, toujours sur le rond central.
Dans le cas idéal, nous étions capables de déposer 3 piles de 4 palets sur le rond central, soit un maximum de 54 points (3 fois (6+5+4+3)). Un cas "standard", de 2 piles de 3 palets, nous permettait de marquer 24 points, plus éventuellement 10 points de victoire.
Déroulement de la coupe
Avant de pouvoir participer à la compétition, le robot doit passer l'homologation. Un arbitre vérifie que notre robot respecte les règles, qu'il sait marquer des points et éviter les robots adverses.
Après l'homologation, les équipes ont cinq matchs pour essayer de marquer le plus de points possible car seules les seize premières peuvent participer aux 8ième de finale.
Liste des matchs de qualification :
- Premier match : face à Telecom Robotics, des problèmes de déplacement. La table sur laquelle nous jouons est fixée au sol de manière trop souple. L'inertie du robot et son accélération trop fortement réglée font que la table bouge et perturbe l'asservissement. Le robot se perd, ne pose aucun palet, double défaite : 2 à 2 (une défaite donne 2 points, un forfait 0).
- Deuxième match : face au robot XD qui ne démarre pas, nous posons une pile de 4 palets sur le rond central. Nous marquons 18 points + 10 points pour la victoire.
- Troisième match : face à Supaéro, notre robot se bloque contre un palet qui nous empêche de déposer. Nous corrigerons le problème à l'aide d'un élastique qui chasse les palets, mais en attendant, nous perdons le match, 2 à 32.
- Quatrième match : face à Asso Robotique EIA 2, nous gagnons 25 à 3.
- Cinquième match : avant ce dernier match, nous avons travaillé toute la nuit afin de fiabiliser la prise de palets dans les distributeurs et la construction de colonnes même en cas de blocage. Si tout ce passe bien, l'accès aux finales n'est pas impossible. Malheureusement, après avoir déposé une première colonne notre robot se fait bloquer dans un coin par l'équipe adverse qui a arrêté son robot avant la fin du match. Nous gagnons tout de même 28 à 0, mais ce n'est pas suffisant pour les finales.
Après les matchs de qualification, nous sommes classés 23ièmes ! La coupe s'arrête ici pour nous.
Malgré un classement moins bon que l'an dernier, nous avons progressé sur le robot, avec une mécanique plus fiable et une intelligence artificielle plus poussée. La coupe nous montre une fois de plus qu'il faut absolument multiplier les tests avant le concours pour améliorer notre score.
Merci à tous ceux qui nous ont soutenu et nous ont permis d'arriver à ce beau résultat !
Les vidéos
Les plus de notre robot
Une mécanique solide, rapide et pratique
Notre vitesse de chargement ne laissait pas indifférent :
Très pratique, le robot s'ouvre et se démonte très facilement :
Une intelligence artificielle qui s'adapte à la situation
...et qui sait s'occuper facilement de plusieurs tâches simultanées.
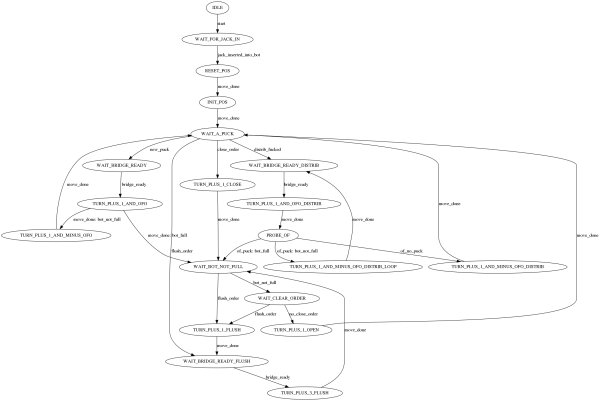
Pour arriver à ce résultat, nous décrivons le robot par un ensemble de machines à états. Ce sont ces machines à états qui définissent la réaction du robot aux évènements extérieurs.
Nous avons inventé pour cela un langage de description qu'un programme converti en langage compréhensible par le micro contrôleur du robot.
Voici par exemple la description du comportement principal du robot :
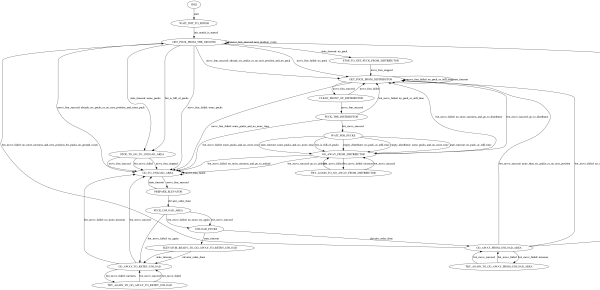
Et le comportement du barillet, qui fonctionne en parallèle :
Plus de détails.
Une prise USB pour accéder à tout le robot
L'an dernier, nous avons eu beaucoup de problème avec la carte qui permettait de se connecter au robot pour le programmer.
Cette année nous avons décidé de développer notre propre système. Le résultat : tout le robot est accessible par une simple prise USB. Grâce à cette prise, on peut se connecter jusqu'à quatre cartes pour reprogrammer le micro contrôleur ou dialoguer avec lui par son lien série.
Plus de détails.
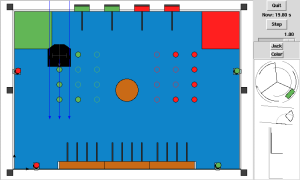
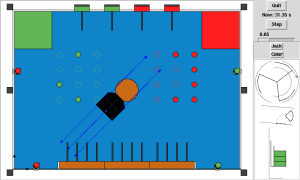
Le simulateur amélioré
La nouvelle architecture du simulateur permet d'ajouter plus facilement des nouveaux robots ou composants. Aussi nous avons ajouté la possibilité de simuler les palets pris sur la table.
Le crédo du simulateur reste toujours : simplicité avant tout !
Plus de détails.
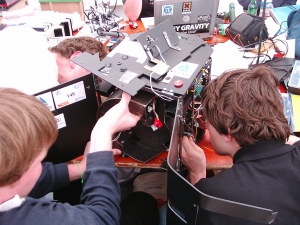
Autour du robot
Mais la coupe de robotique, ce n'est pas que des matchs entre robots, c'est aussi une ambiance festive !
APBTeam étant en grande partie constitué d'ancien de l'EFREI, nous avons pris l'habitude d'animer la coupe avec l'aide notamment de l'association HiFi EFREI et EFREI Robotique.
Nous étions même entouré d'une quinzaine de supporters, venus nous encourager et participer à la fête !
Merci beaucoup à ceux qui se sont démené pour organiser le voyage et nourrir non seulement les développeurs, mais aussi les supporters !
Mais, ça ne se raconte pas, ça se vit ! Venez (ou revenez) nous voir l'an prochain !










L'année prochaine
On remet ça !
Au programme des améliorations :
- participer à la coupe de Belgique afin de confronter notre robot plus tôt aux problèmes des vrais matchs ;
- tout le robot accessible sur une prise ethernet ;
- un système de balise pour connaître à tout moment la position du robot adverse ;
- une mécanique qui guide mieux les éléments afin d'augmenter encore la vitesse, et plus de capteurs pour savoir exactement ce qui se passe dans le robot ;
- une arrivé en quart de finale !
Et bien sur, nous continuerons à améliorer notre base actuelle et sa documentation.