Compte-rendu APBTeam 2010
En deux minutes ?
Cette année, nous avons commencé le robot très tard pour deux raisons : un règlement qui a eu du mal à se stabiliser, et un grand changement d'effectif dans l'équipe avec plusieurs membres qui nous ont quittés pour d'autres projets. Ce retard nous a empêché de réaliser certaines améliorations, comme la balise ou la participation à la coupe de Belgique.
Toutefois, nous avons réussi à homologuer tôt, le mercredi soir, ce qui nous a permis de travailler sereinement à améliorer notre score.
Nous sommes arrivé 20ième, avec 3250 points, sur 121 équipes homologuées, et 168 équipes inscrites. Mais surtout, nous sommes très fiers d'avoir reçu le prix du jury ! Ce prix nous a été attribué par un jury composé de bénévoles de Planète Sciences pour le partage que nous faisons tout au long de l'année sur tous les éléments qui composent le robot.
Nous avons aussi participé à la coupe d'Île de France et nous somme arrivés 2ième, juste derrière Microb qui a remporté la coupe de France. Le robot était alors beaucoup plus fiable qu'à la coupe de France, ce qui montre l'importance de faire de nombreux tests avant la coupe.
Au niveau technique, nous avons réalisé une mécanique rapide qui commence à devenir caractéristique des robots APBTeam et qui a eu beaucoup de succès auprès des visiteurs du stand. Nous avons investi dans des capteurs ultra soniques industriels afin de fiabiliser la détection et l'évitement d'obstacles. Nous avons aussi conçu une nouvelle carte de contrôle moteurs qui intègre la partie contrôle ainsi que la partie puissance.
Comme d'habitude, nous participons à l'animation de la coupe. Cette année, nous avons aussi programmé le robot pour lancer une ola, il est donc monté sur scène juste avant la finale pour une démonstration.
Pour APBTeam, l'avenir s'annonce prometteur puisque nous avons eu des contacts avec plusieurs personnes qui veulent rejoindre l'équipe (venant de l'ISEP, de l'EFREI ou rencontrées à la coupe).
Tout cela n'aurai pas été possible sans le soutien et le travail des membres de l'équipe, ainsi que sans l'aide de nos sponsors :
Le robot
La coupe de France de robotique
La coupe de France de robotique, est un concours qui oppose des équipes ayant réalisé des robots autonomes suivant un règlement qui change tous les ans. Les robots sont complètement autonomes, c'est à dire qu'ils doivent prendre eux même les décisions des actions à effectuer.
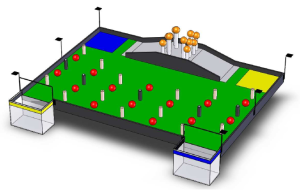
Après avoir joué au rugby, au bowling, avoir trié des déchets, avoir collecté des échantillons sur Mars, et construit des Temples antiques, nous allons cette année collecter des denrées alimentaires, fruits, céréales et légumes afin de faire des réserves et de les redistribuer à ceux qui en ont besoin.
Nos robots devront donc collecter le plus possible de fruits, céréales et légumes.
Les matchs impliquent deux équipes, l'une en bleu, l'autre en jaune. Chaque équipe ne peut engager qu'un seul robot. Les matchs durent 90 secondes.
Les robots partent d'une zone de départ à leur couleur, située dans l'un des coins arrière de la table. Les éléments de jeu sont disponibles en plusieurs endroits de la table, soit directement au sol à des positions prédéfinies et aléatoires, soit à des positions surélevées.
Les éléments collectés sont à mettre dans des conteneurs à l'avant de la table (un conteneur par équipe).
Les éléments les plus difficiles à attraper sont les plus lourds.
Ainsi le robot qui gagne est celui qui aura mis le plus de poids dans son conteneur.
Les règles complètes sont disponibles ici : http://www.planete-sciences.org/robot/data/file/E2010_Rules_and_drawings_FR.pdf
Vous l'avez compris : il faut ramasser tout ce qu'il y a sur la table et le déverser dans les conteneurs. La difficulté est de se déplacer dans un vrai champ de mines qui menace de bloquer le robot dans ses déplacements.
N'ayant pas une base adaptée, nous n'avons pas essayé de gravir la pente menant aux oranges, nous nous somme concentré sur la collecte des tomates et maïs.
L'idée de notre mécanique est de pouvoir ramasser n'importe quel type d'objet avec un seul système.
Déroulement de la coupe
Avant de pouvoir participer à la compétition, le robot doit passer l'homologation. Un arbitre vérifie que notre robot respecte les règles, qu'il sait marquer des points et éviter les robots adverses.
Après l'homologation, les équipes ont cinq matchs pour essayer de marquer le plus de points possible car seules les seize premières peuvent participer aux 8ième de finale.
Liste des matchs de qualification :
- Premier match : face à Robotech' Montpellier, collision dans la première diagonale, notre robot tente un évitement, mais un bug fait qu'il n'arrive pas à trouver d'échappatoire (le robot concurrent est trop près). Le robot concurrent est arrêté par l'arbitre car il continue d'avancer sans nous voir. Nous gagnons 50 points de défaite, face à 0 pour un forfait.
- Deuxième match : face à Color Team, notre robot dépose un premier chargement, mais le deuxième n'est jamais déposé à cause d'un blocage non géré de la pince. Avec 3 tomates, nous gagnons 650 à 50.
- Troisième match : face à Valrobotik, toujours trois tomates, puis le robot, trop prudent, se bloque toujours à cause du bug du premier match. Nous gagnons 650 à 50.
- Quatrième match : face à SUMO Supélec, n'ayant aucune confiance dans leur évitement, nous choisissons de modifier le programme pour les laisser passer (leur robot utilise des capteurs Sharps avec un temps de réponse important, pourtant ils vont très vite sur la première diagonale). Nous déposons notre premier chargement, mais le robot se bloque aussi à cause d'un cas non géré de blocage de pince. Nous gagnons 500 à 0.
- Cinquième match : face à AIR ISEP, cette fois ci nous pensons avoir géré tous les cas possibles de blocage de pince et le bug de contournement a été corrigé. Le robot fonctionne correctement et fait trois déchargements pour un total de 8 tomates. Nous gagnons 1400 à 50.
Après les matchs de qualification, nous sommes classés 20ièmes !
Merci à tous ceux qui nous ont soutenu et nous ont permis d'arriver à ce beau résultat !
Les vidéos
Les plus de notre robot
Une mécanique simple, efficace et rapide
Les pinces se ferment à 1 m/s et l'ascenseur monte à 0.6 m/s. Grâce à un programme de démonstration et à une bonne visibilité, il est facile d'en expliquer son fonctionnement.
La précision de notre base roulante permet aussi de faire un match complet sans aucun recalage.
Une intelligence artificielle qui s'adapte à la situation
...et qui sait s'occuper facilement de plusieurs tâches simultanées.
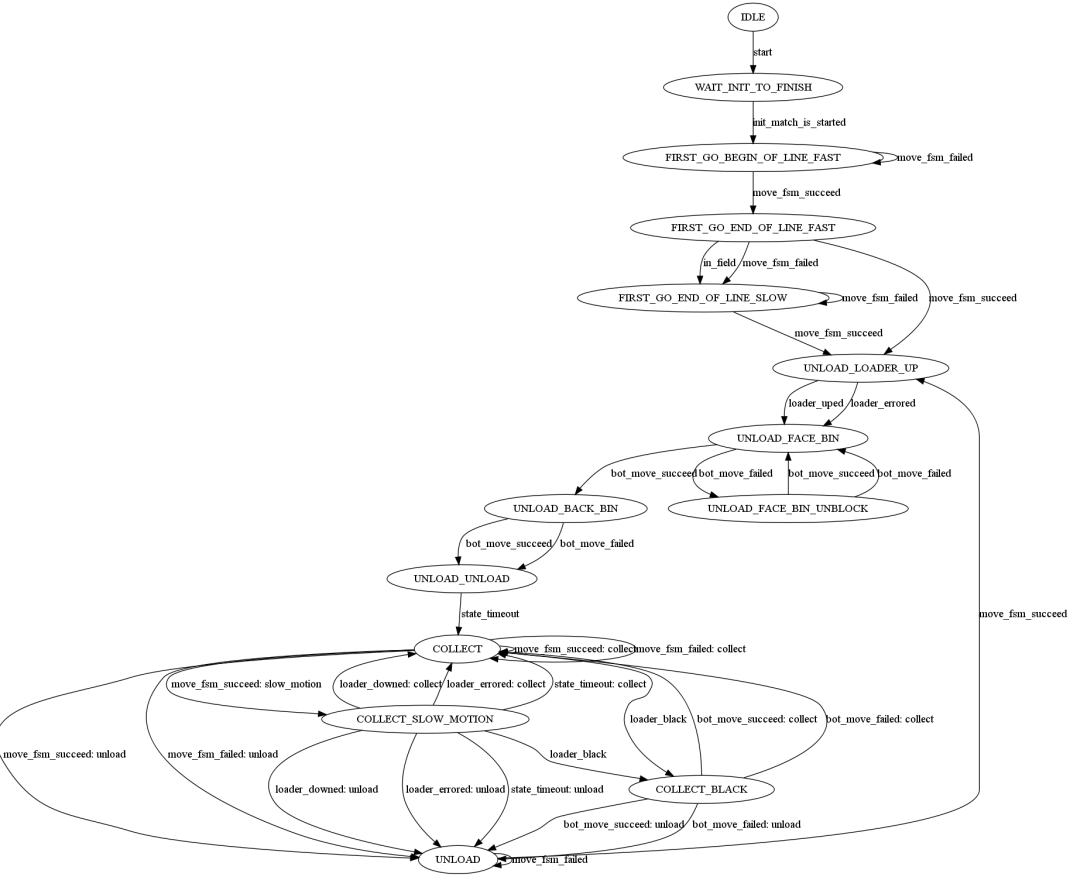
Pour arriver à ce résultat, nous décrivons le robot par un ensemble de machines à états. Ce sont ces machines à états qui définissent la réaction du robot aux évènements extérieurs.
Nous avons inventé pour cela un langage de description qu'un programme converti en langage compréhensible par le micro contrôleur du robot.
Voici par exemple la description du comportement principal du robot :
Et un extrait du comportement de la pince (sans la séquence d'initialisation) :

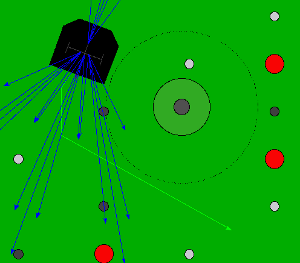
Le robot est aussi capable de se déplacer sur la table en évitant les obstacles. Nous utilisons pour cela l'algorithme A* afin de trouver le plus court chemin vers notre objectif :
Une nouvelle carte de contrôle moteurs
Le robot inclus six moteurs asservis. Nous avons développé une nouvelle carte pour pouvoir facilement piloter les moteurs supplémentaires. Elle a comme caractéristique d'intégrer la partie contrôle ainsi que la partie puissance.
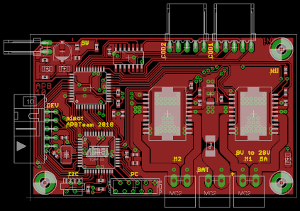
Plus de détails...
Autour du robot
Mais la coupe de robotique, ce n'est pas que des matchs entre robots, c'est aussi une ambiance festive !
APBTeam étant en grande partie constitué d'ancien de l'EFREI, nous avons pris l'habitude d'animer la coupe avec l'aide notamment de l'association HiFi EFREI et EFREI Robotique.
Nous étions même entouré d'une quinzaine de supporters, venus nous encourager et participer à la fête !
Merci beaucoup à ceux qui se sont démené pour organiser le voyage et nourrir non seulement les développeurs, mais aussi les supporters !
Mais, ça ne se raconte pas, ça se vit ! Venez (ou revenez) nous voir l'an prochain !







L'année prochaine
On remet ça !
Au programme :
- intégrer les nouvelles recrues,
- réaliser une nouvelle base mécanique,
- participer à la coupe de Belgique,
- réaliser un système de balise,
- préparer un stand d'initiation à la soudure CMS sur la coupe.
Bien sur, nous continuerons d'améliorer la documentation sur ce site !