Status: out of date.
Stratégie
Suite à une réunion sur la mise en place de l'intelligence artificielle du robot, nous avons défini la stratégie suivante, qui se découpe en quatre phases :
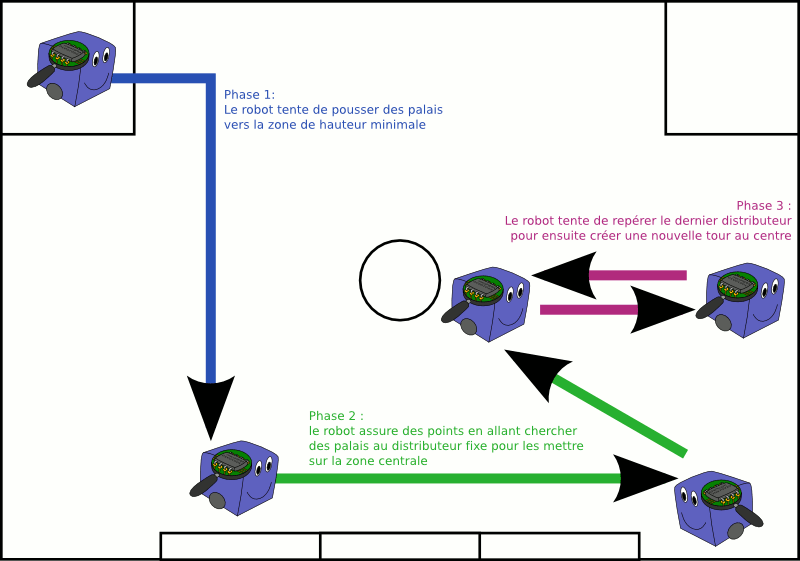
Phase 1 : pousser les palets
Après le départ du robot de sa zone de démarrage, il doit pousser les palets au sol vers le niveau 0. Idéalement, il faudra étudier les positions aléatoires des palets pour voir le chemin le plus idéal pour en pousser le plus grand nombre.
Cette manœuvre se fera en marche avant.
Phase 2 : aller au distributeur fixe
Comme on connaît la position fixe de l'un de nos distributeurs, le robot va se diriger vers celui-ci. Le chemin le plus court sera de passer par le bas de la table, mais il se peut que l'on rencontre le robot adverse.
Le maximum de palets autorisés sera chargé dans le robot.
Un contacteur sera utilisé pour savoir si l'on bien en contact avec le distributeur.
Cette manœuvre se fera en marche arrière car cela permettra d'attaquer la phase 3 dans une meilleure position. Par contre, il faudra faire attention à ce que l'ascenseur soit mis en position basse afin de ne pas bloquer de palets en dessous.
Phase 3 : dépose sur le rond central
Une fois les palets chargés, le robot ira les déposer sur le rond centrale.
Cette manœuvre s'effectua en marche arrière pour arriver dans la bonne position. Il faudra faire attention à ne pas pousser de palets lors de cette manœuvre (c'est peut-être même interdit, à confirmer).
Peut-être qu'il faudra rajouter une manœuvre d'approche un peu différente pour être sûr qu'on ne bloque pas un palet entre le robot et le rond centrale.
Un capteur sharp sera utilisé pour s'assurer que l'on dépose notre construction sur un emplacement vide (il faudra aussi gérer le cas ou tous les emplacements sont occupés).
Il faudra lever l'ascenseur au moment de la dépose de la construction.
Phase 4 : distributeur aléatoire (bonus)
Une fois le robot vidé de ses palets, il ira au distributeur aléatoire. Plusieurs méthodes sont possibles pour déterminer sa position : * utiliser un capteur sharp quand on est placé devant une des positions aléatoires du distributeur. Afin d'augmenter la fiabilité de cette solution, l'idée serait de mettre un support balise sur le haut du distributeur pour qu'il soit plus visible par le sharp. Cette solution ne nécessiterait pas qu'on est besoin de se mettre complètement sur la position du distributeur. * utiliser le contacteur pour savoir qu'on est bien contre le distributeur et donc essayer les deux positions tour à tour. * aller aux deux positions du distributeurs et chargés les palets (en utilisant les capteurs internes de détections des palets du robot pour savoir si on est bien sur un distributeur ou pas).
Une fois qu'il aura récupéré de nouveaux palets, il ira les déposer sur le rond centrale en utilisant la méthode de la phase 3.