Beacon using Time Difference of Arrival
This kind of measure can be obtained for example by comparing phase of RF signals, or arrival times of ultra sound signals. Without synchronisation between the sender and the receiver, the time of travel can not be measured (Can it be? Did you say Ultra Wide Band?). But with synchronisation only between receivers, it is quite easy to determine the difference between their time of travel.
Using receiver on beacon supports
Here, receivers are placed around the playground. They are synchronised together and receive a signal from the mobile robot.
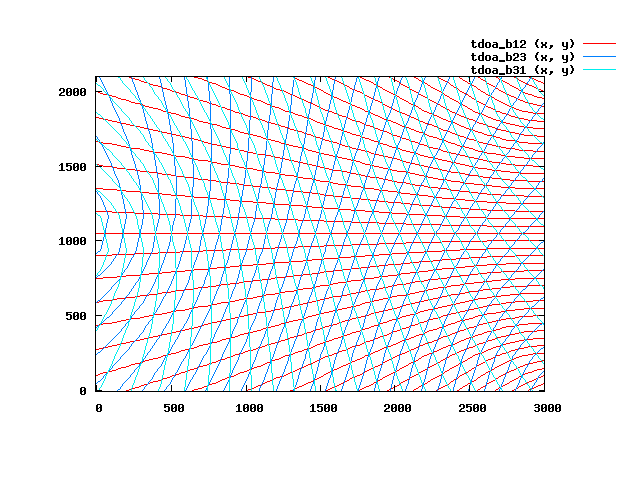
Beacon B1 is at (3000, 0), B2 at (3000, 2100), B3 at (0, 1050).
In the following graphs, tdoa_bnm is the time difference of arrival at Bn and Bm. Lines represents positions for which the time difference is the same.