Beacon system using triangulation (from robot)
To find its position, a sensor is attached to a robot which measures angles between beacons attached at playground beacon supports.
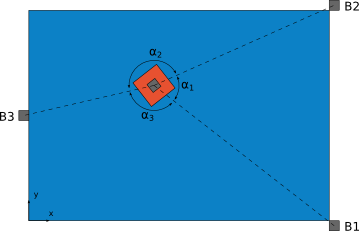
Beacon B1 is at (3000, 0), B2 at (3000, 2100), B3 at (0, 1050).
Precision evaluation
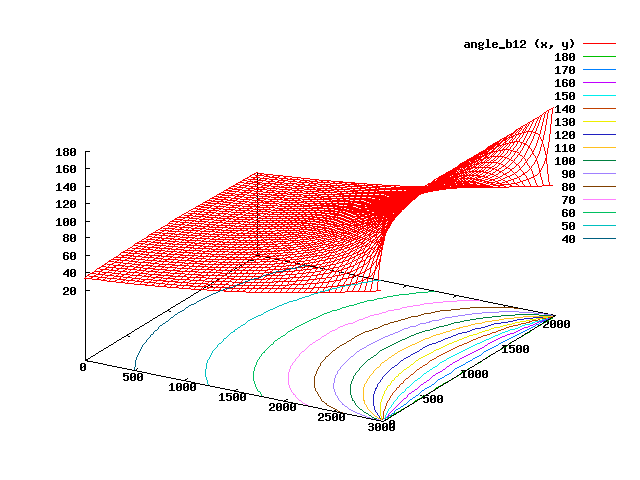
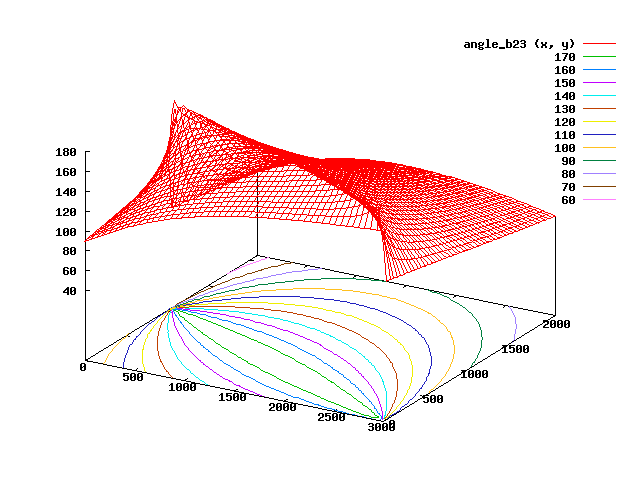
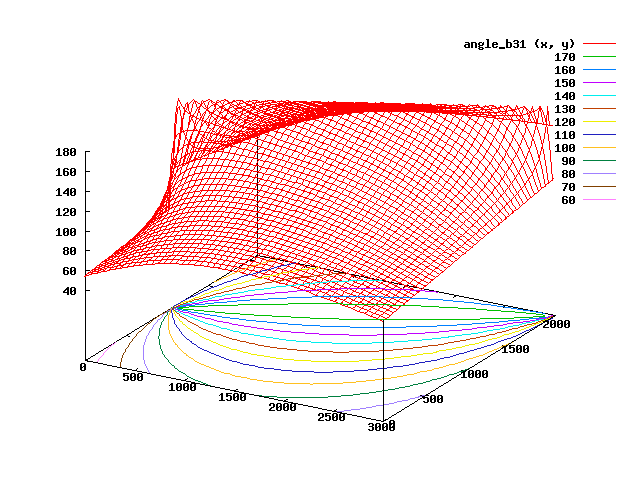
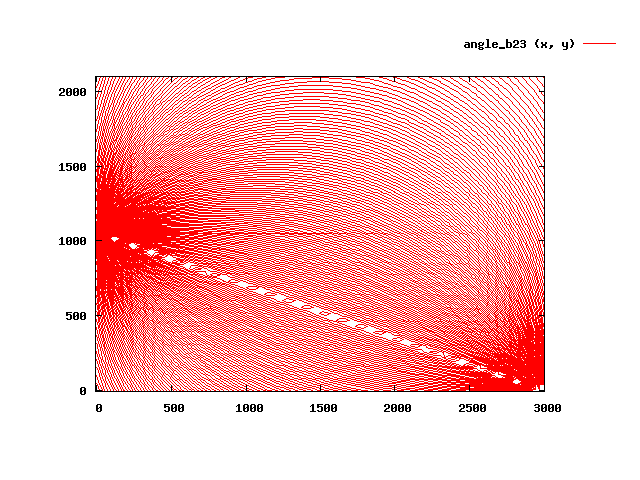
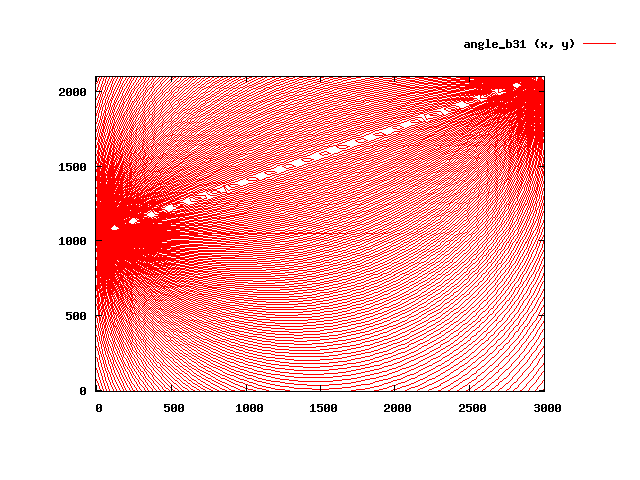
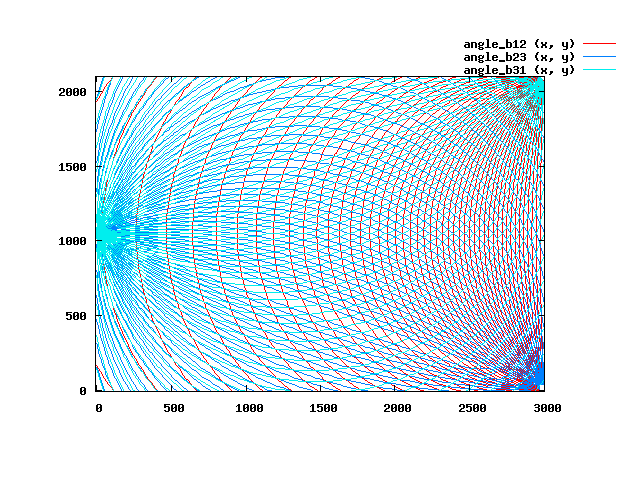
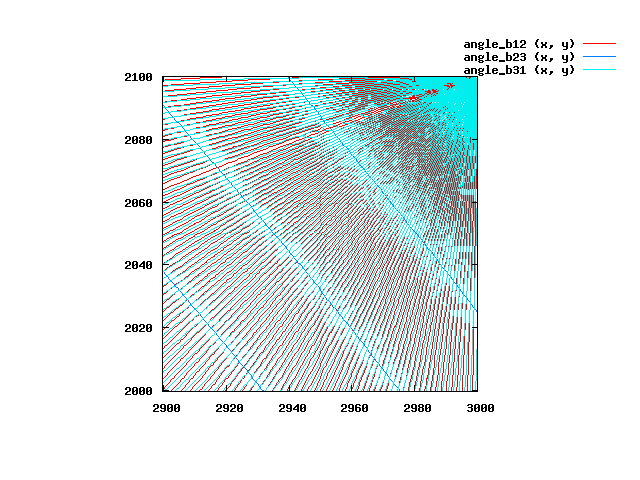
In the following graphs, angle_bnm is the angle measured between Bn and Bm. A resolution of one degree has been assumed. The lines represents the set of positions for which the angle is the same.
First, here is the found angles according to robot position:
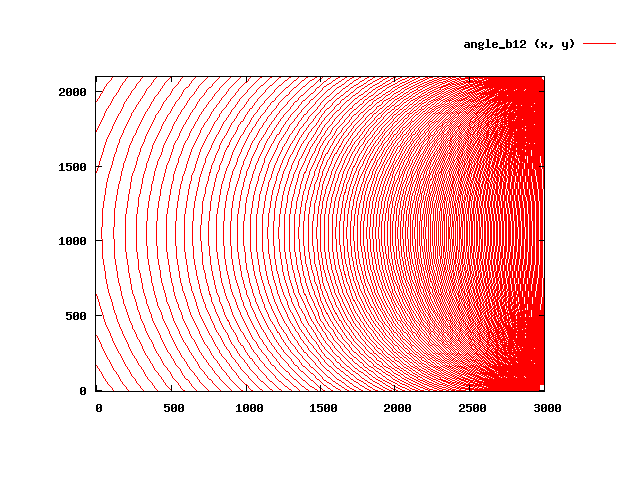
With all three beacon, quite unreadable:
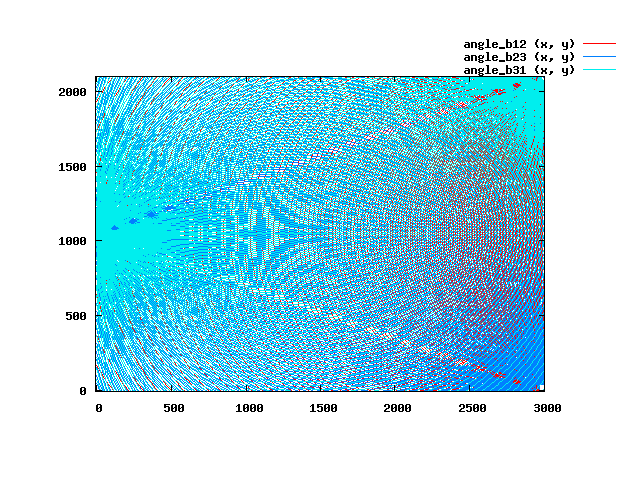
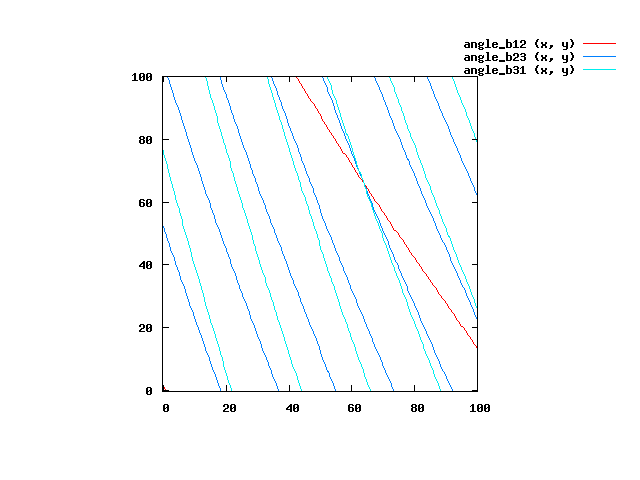
Same thing, but with 3 degree of resolution:
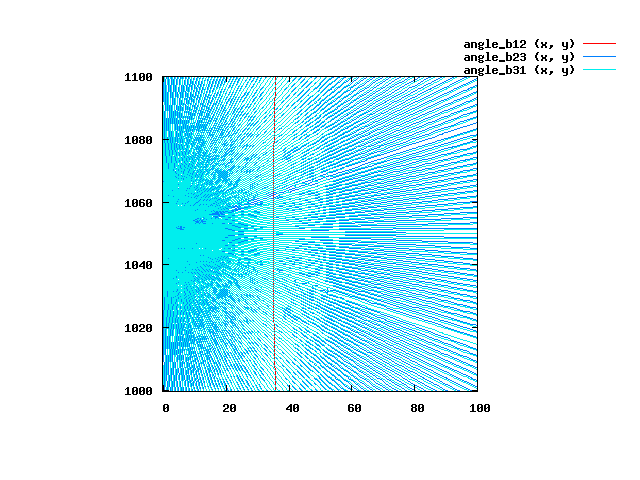
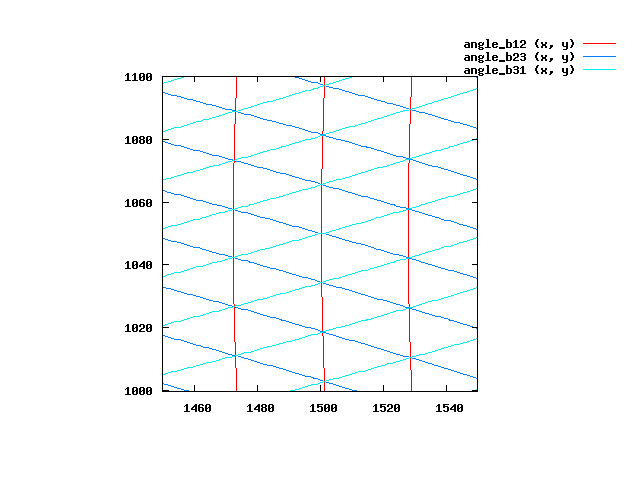
Zoom to some interresting regions, each square is 10 cm wide (back to 1 degree of resolution):
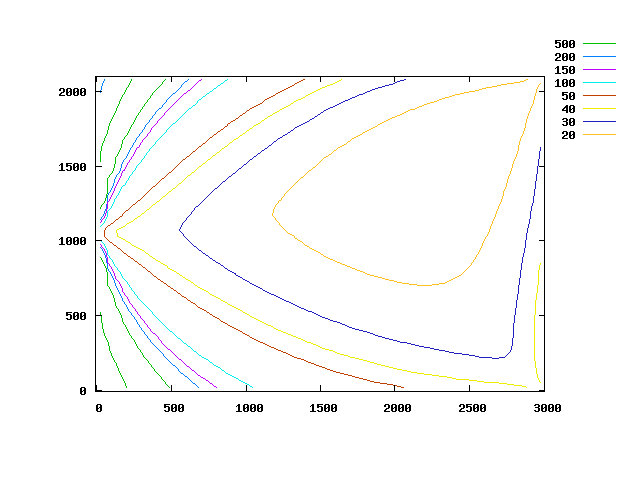
Evaluation of position error:
Links
http://www.cvra.ch/content/view/52/73/
http://www.microb-technology.org/index.php/Microb_Technology/2008/Beacons
http://fsfcayne.free.fr/balises_eurobot06/Balises_CPLN_Eurobot_2006.pdf