Système de repérage via la puissance radioactive
Principe de la radioactivité
La radioactivité est un phénomène naturel provenant de la désintégration d'un noyau atomique instable. Celui ci se désintègre en dégageant un rayonnement énergétique et en créant des noyaux atomiques plus petits. L'élément le plus connu est sans aucun doute l'uranium 235 mais il y a aussi bien d'autres éléments comme le carbone 14 connu pour la datation de trouvaille archéologique ou le cobalt dans la céramique.
Il est possible de trouver des pierres émettant une radioactivité non négligeable dans la nature, en particulier les granits des Vosges. Nous utilisons d'ailleurs un de ceux ci pour nos expériences. Notre balise sera un cube de granit des Vosges aux dimensions réglementaires.
Le compteur Geiger-Muller
Il s'agit d'un appareil permettant de quantifier les rayonnement ionisant. Le principe de celui ci est simple : un gaz est contenu dans un tube et les rayonnements ionisent le gaz (voir l'effet Compton). Il y a un effet d'entraînement qui permet de rendre le gaz conducteur pendant un moment. Il est possible via un capteur (un simple transistor relié sur une plaque métallique) de mesurer l'efficacité. Il existe un effet de seuil dépendant du gaz, de la taille du tube et de la ionisation. Pour nos essais, le gaz est de l'air sous pressurisé.
Principe du repérage
Comme présenté ci dessus, nous avons une mesure du rayonnement avec un guide (une simple tige en plomb). Le tube se trouve dans une petite cage recouverte de plomb (pour éviter un maximum de perturbation) relié à une plaque pour la réception. Celle-ci pilote un transistor relié à une des entrées analogiques d'un AVR.
Une mesure est réalisée toute les 40ms ce qui nous permet d'avoir 25 mesures par secondes donc 75 mesures en 3s. Un système de pivot permet de faire tourner l'appareil pour mesurer dans d'autres direction.

Principe de guidage
Le principe de guidage repose sur le repérage général puis le traking : on fait le tour en 3s ce qui permet de repérer globalement la source la plus forte, et nous fourni deux informations :
- la direction ;
- la distance.
1) Pour connaître la direction, on se fie à la mesure de plus forte amplitude.
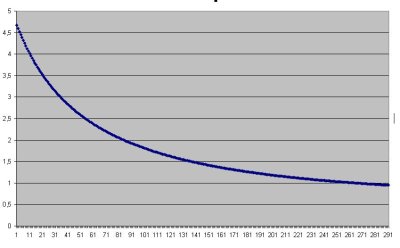
2) Pour connaître la distance, on utilise l'abaque suivant :
C'est une courbe qui ressemble un peu à une courbe en 1/x mais très allongée sur la fin. On prend des points de références puis on compare avec la courbe.
Une fois ce signal arrivé, alors on cible autour de ce point et on reprend un nouveau point de repère toute les secondes.
Si le signal est perdu ou si une nouvelle acquisition est nécessaire, on refait un tour complet.
Ce système est assez simple et plutôt performant. Cela nous permet de connaître la position du robot adverse avec une précision d'environ 10cm (~5cm à moins d'1m).