AquaJim FSM
Robot intelligence is controlled using Finite State Machines. You will find on this page a render of FSM used in AquaJim, the robot for Eurobot 2009.
You may need to read source code in order to make sense out of some obscure state names :).
For more general information on Artificial intelligence in APBTeam robot, please see the general artificial intelligence page.
- Top FSM: coordinator of other FSM
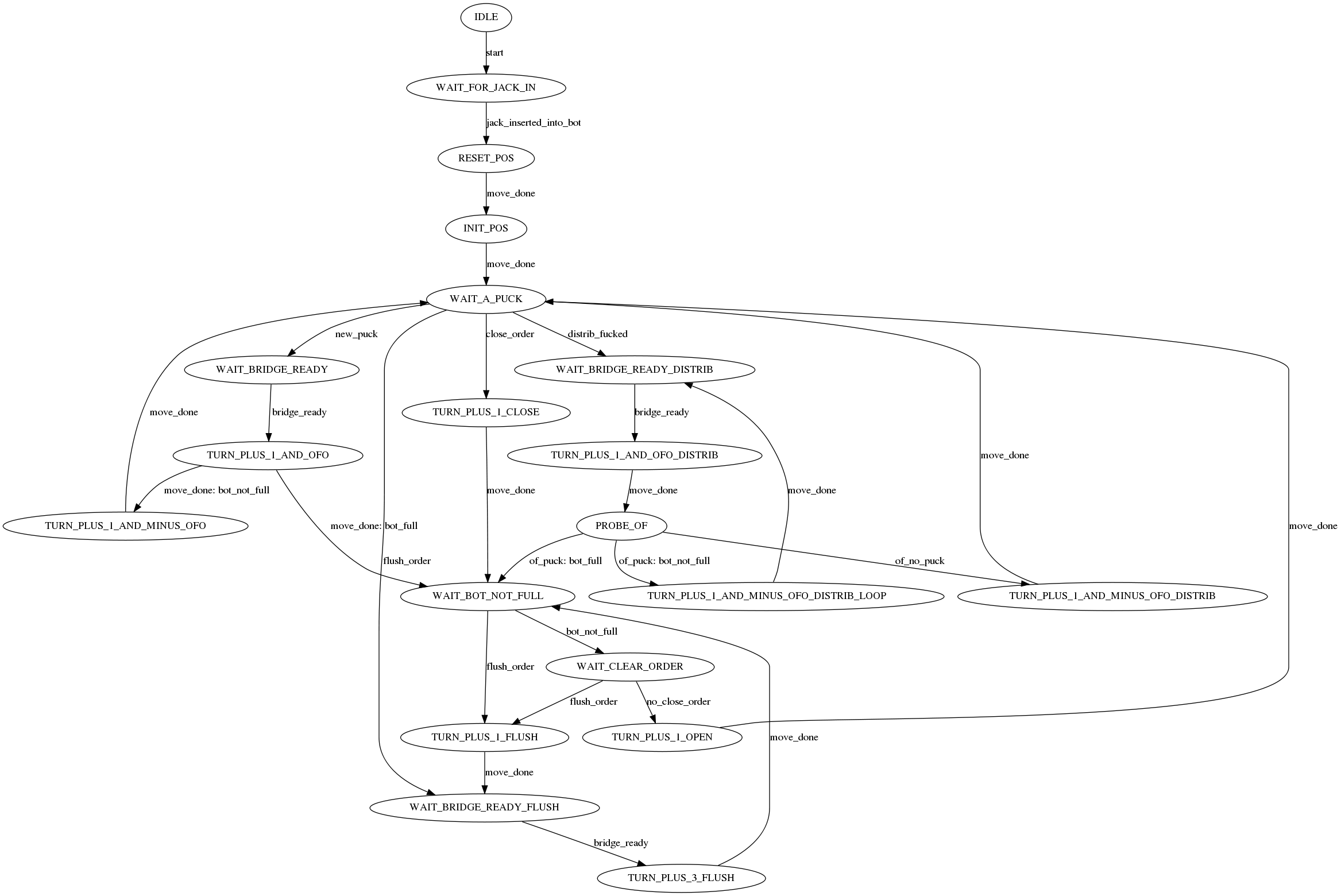
- Cylinder FSM: handling front cylinder rotation and puck loading
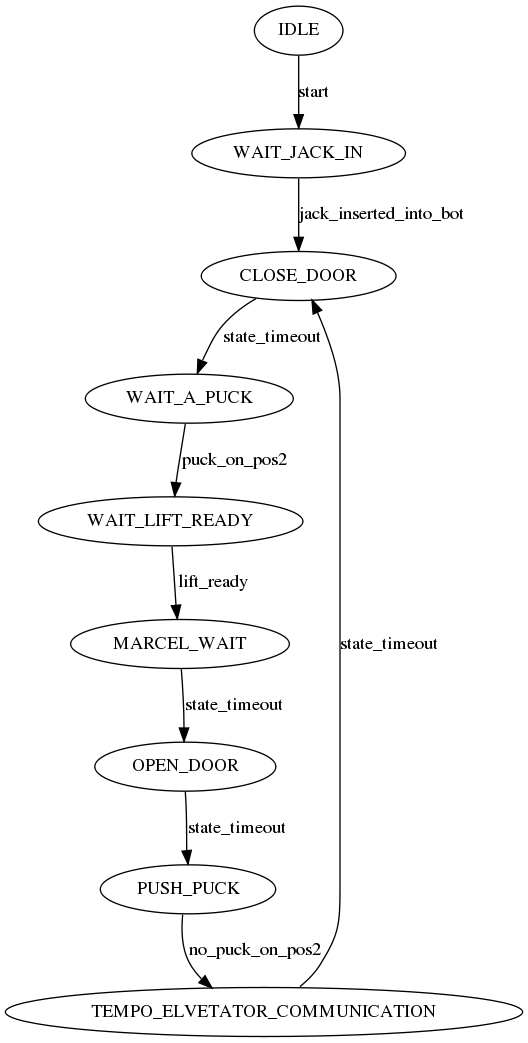
- Filter bridge FSM: moving pucks from cylinder to elevator
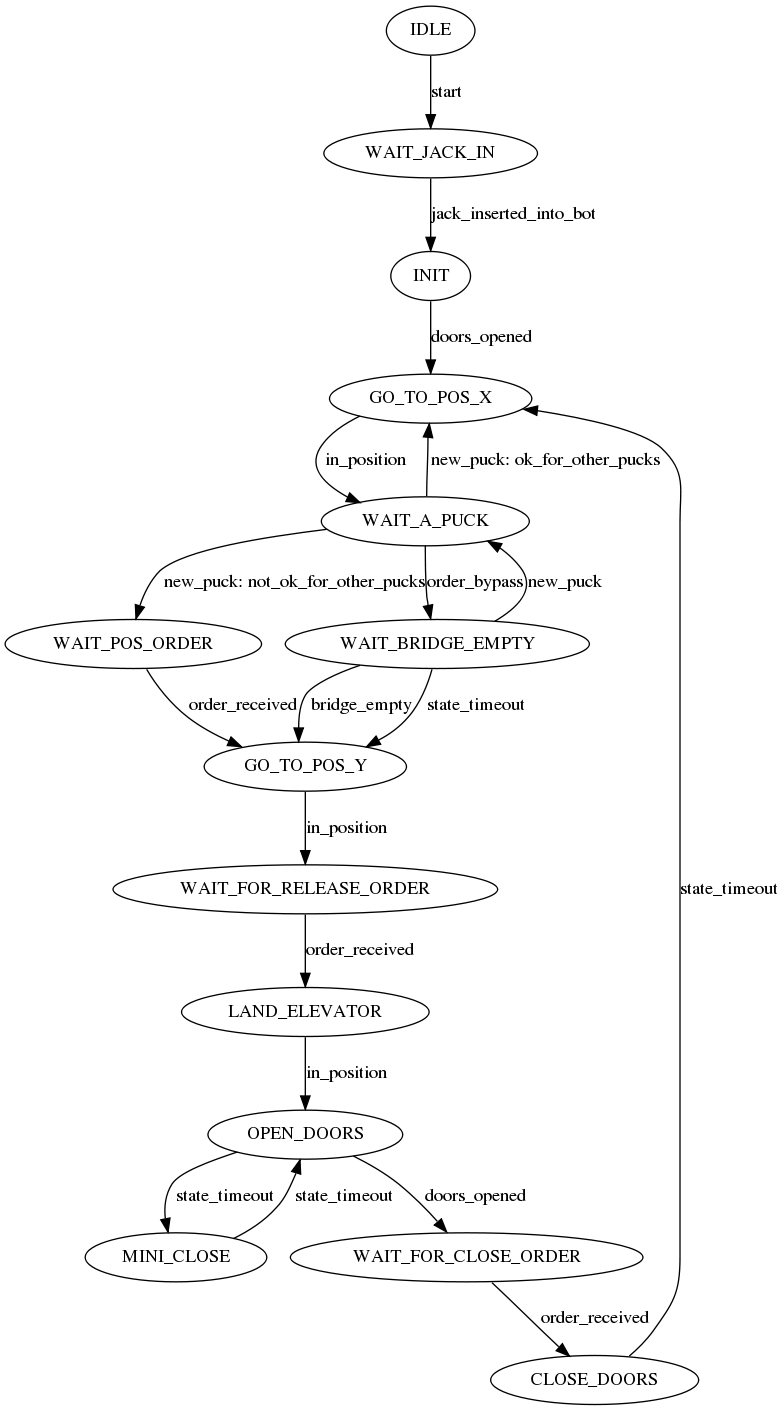
- Elevator FSM: handling elevator and puck unloading
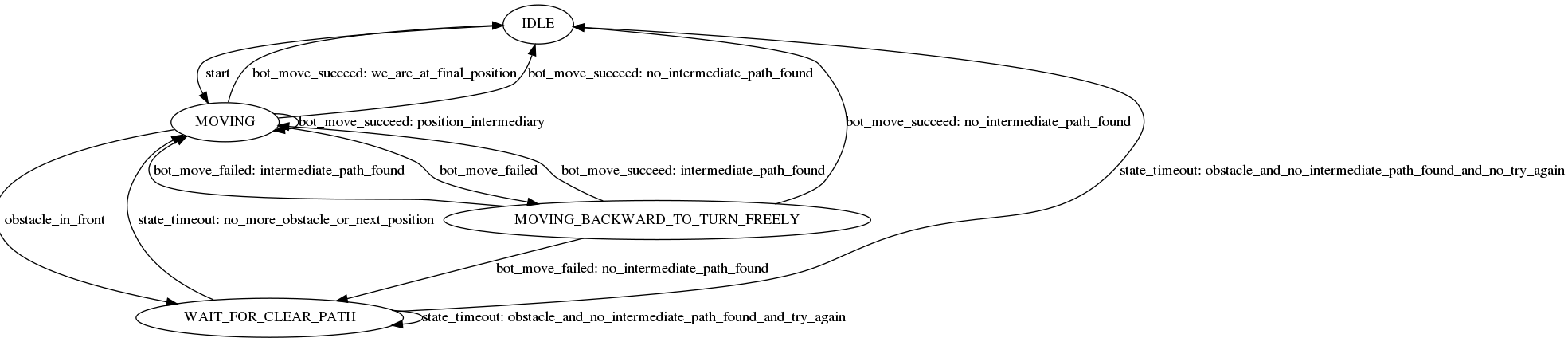
- Move FSM: handling movements and obstacle avoidance
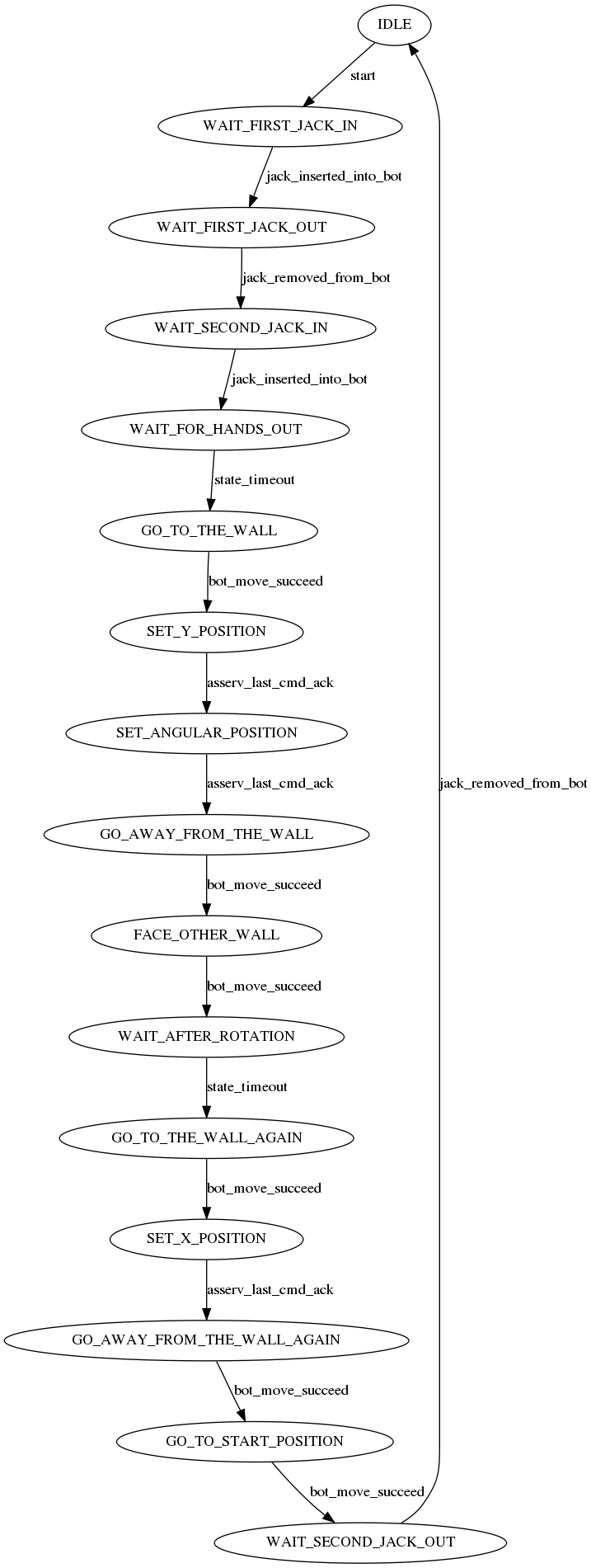
- Initialisation FSM: handling the start procedure
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}