Driving base
Status: new base used successfully for Eurobot 2011.
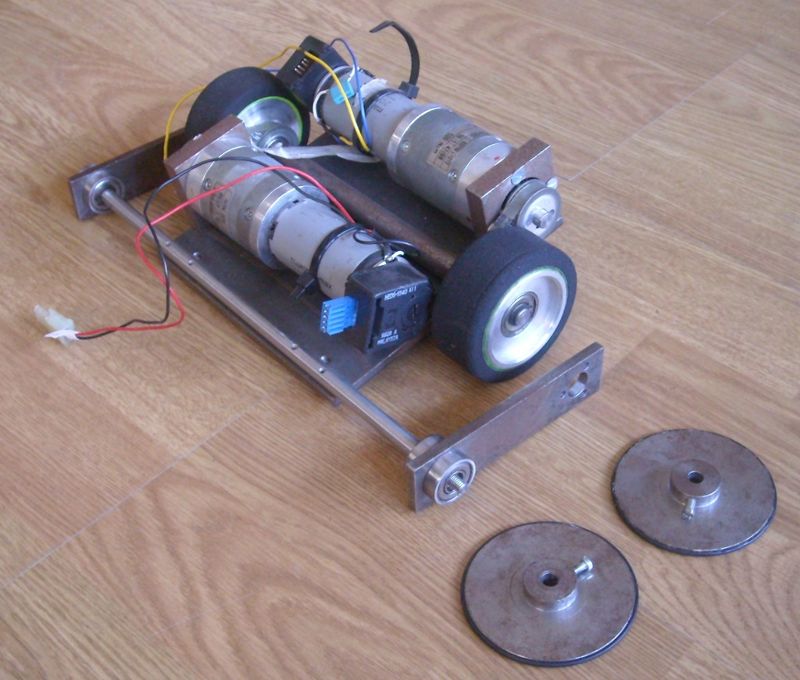
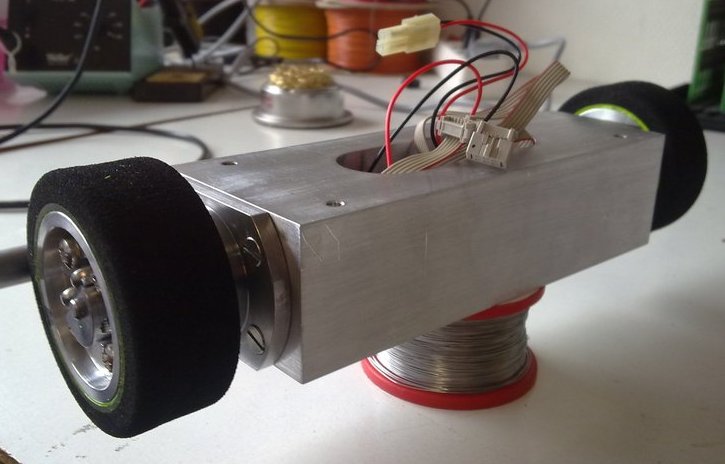
All our robots are built around a drive base. This base can be reused every years and is composed of:
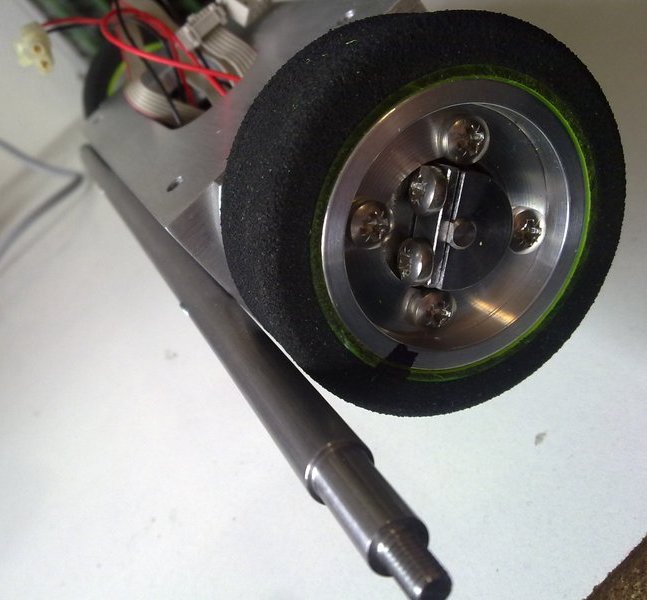
- a pair of motors with their large wheels to make the robot move,
- smaller wheels mounted on optical coders to sense the robot movement.
The robot uses a differential drive. This means that there is right and left motors and both must be running at the same speed to follow a straight line.
The coder wheel are independents of the driving wheel. This enables the robot to detect loss of adherence of the driving wheels.
Pictures

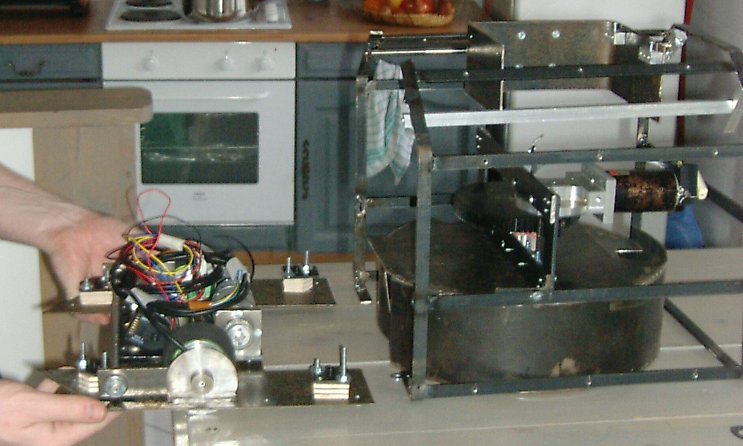
Old driving base
The previous base used larger motors and took too much room in the robot.